











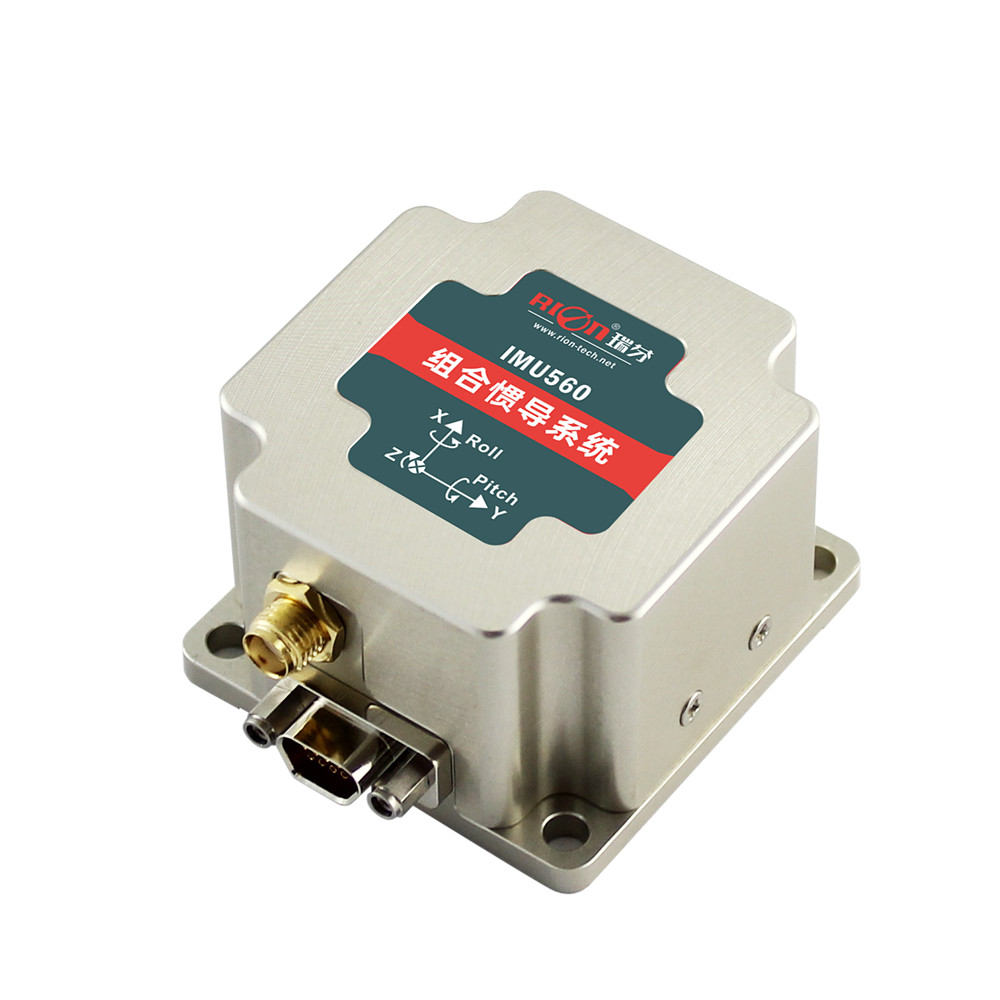
Согласно заказу вращения Z-Y-X, когда положительное направление X-оси направлено к фронту несущей, угол вращения вокруг Z-оси возглавляя угол, угол вращения вокруг Y-osи угол тангажа, и угол вращения вокруг X-оси угол крена.



Особенность
●Нестабильность 10°/h гироскопа косая (отклонение Аллан)
●Отступление 1.7mg акселерометра (ряд 2g)
Применение
●Двигая блок ориентации
●Навигация автомобиля и измерение и система управления
●Измерение и система управления быстроходного поезда
●Исследующ и составляющ карту системы POS
●Инженерство корабля и океана
●Океан и подводное отображение
●Управление полетом
Серия IMU560 расположена как корабль/shipborne общий инерциальный и интегрированный продукт навигации,
целевой рынок:
(1) динамическое сообщение
навигация корабля (2)
(3) динамических измерения ориентации
Согласно заказу вращения Z-Y-X, когда положительное направление X-оси направлено к фронту несущей, угол вращения вокруг Z-оси возглавляя угол, угол вращения вокруг Y-osи угол тангажа, и угол вращения вокруг X-оси угол крена.
1. Электропитание должно быть DC 9-36V, пульсация <50mv>
2. Винт применения M4 IMU полукруглый главный зафиксирован на несущей, и разрыхленность во время деятельности повлияет на точность измерения.
3. Если возможный, установите его на центр притяжения несущей или около центра притяжения.
4. Попробуйте избежать строгой вибрации, неожиданных изменений температуры (как установленный рядом с двигателем), и амортизаторов удара пользы при необходимости.
5. Выровняйте ось IMU с осью несущей как можно больше.
Размер