

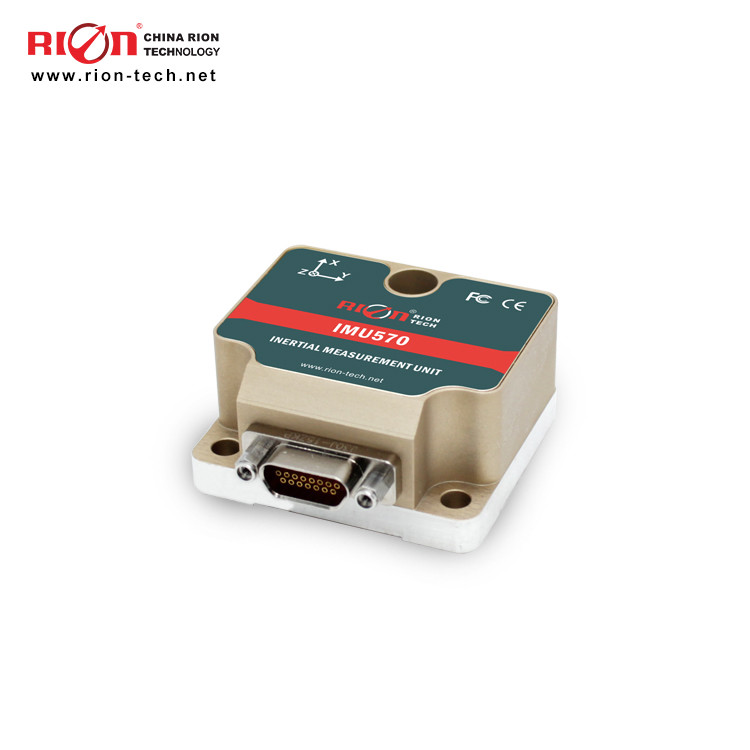


Блок инерциальной навигации IMU570 составлен трехосного волчка, трехосного ускорения, датчика температуры и цепи обработки сигнала. Измерена трехосная скорость изменения пеленга несущей, и 3 данного по скорости изменения пеленга после того как компенсация ошибки (включая компенсация влияния температуры, компенсация рассогласования установки, нелинейная компенсация, etc.) выход через серийный порт RS422 согласно соглашенному комуникационному протоколу. Продукт принимает дифференциальную структуру волчка, эффектно задерживает влияние линейных ускорения и вибрации, и принимает полную компенсацию влияния температуры для того чтобы одеть жесткая окружающая среда промышленного применения.
Особенность
угловая скорость измерения ★ триаксиальная несущей температура ★ работая: - 40~85℃
температура хранения ★: - 40~85℃ Вибрация ★: 10~2000Hz, 10g
электропитание ★: +5±0.5V (DC) удар ★: 100g@11ms, триаксиальное (половина синусоидальная)
Корабль автопилота ★ Корабль ★ беспилотный воздушный ★AGV
Блок ориентации ★ SOTM Система POS ★ для исследовать и составлять карту
Корабль и судостроение ★ Океан ★ и подводные исследовать и составлять карту
Система управления полетом ★ Измерение и система управления быстроходного поезда ★
|
IMU570
|
|
|
Параметры
|
|
||||
|
ГИРОСКОП
|
|
|
|
|
||||
|
Измеряя ряд
|
|
|
1800°/s
|
|
||||
|
Нул нестабильностей смещения (@Allan отклонение)
|
|
|
≤8°/h (- ℃ 20~70)
|
|
||||
|
метод случайного блуждания угла (@Allan отклонение)
|
|
|
≤0.13°/√h & 0.24°/√h
|
|
||||
|
Нул косых чувствительностей ускорения
|
|
|
≤1°/h/g
|
|
||||
|
Разрешение
|
|
|
≤0.001°/s
|
|
||||
|
Нелинейность коэффициента эффекта масштаба
|
|
|
≤100ppm
|
|
||||
|
Повторимость коэффициента эффекта масштаба
|
|
|
≤100ppm
|
|
||||
|
Взаимное влияние
|
|
|
≤0.1%
|
|
||||
|
Ширина полосы частот
|
|
|
≥200Hz
|
|
||||
|
Акселерометр
|
|
|
|
|
||||
|
Измеряя ряд
|
|
|
±38g
|
|
||||
|
Нул нестабильностей смещения (@Allan отклонение)
|
|
|
0.019mg
|
|
||||
|
Нул повторимостей смещения
|
|
|
0.08mg
|
|
||||
|
Метод случайного блуждания скорости (@Allan отклонение)
|
|
|
0.04m/s/√h
|
|
||||
|
Нул диапазонов температур систематической ошибки полностью
|
|
|
0.5mg
|
|
||||
|
Вес
|
|
|
(52±5) g
|
|
||||
|
Другие параметры
|
|
|
|
|
||||
|
Напряжение тока электропитания
|
|
|
(+5±0.5) V (DC)
|
|
||||
|
Электропитание настоящее
|
|
|
Работая current<0.3A
|
|
||||
|
Работая температура
|
|
|
-40~85℃
|
|
||||
|
Температура хранения
|
|
|
-40~85℃
|
|
||||
|
Вибрация
|
|
|
10~2000Hz, 10g
|
|
||||
|
Удар
|
|
|
100g@11ms, триаксиальное (половина синусоидальная))
|
|
||||
|
|
|
|
|
|
||||
Примечание:
интегрированной инерциальной навигационной системе не имеет эту конфигурацию и не нужно быть приостанавливанным.
Внешним источникам пуска нужно специально быть установленным согласно требованиям. Дефолту IMU интегрировал инерциальную навигационную систему не имеет эту конфигурацию и не нужно быть приостанавливанным.
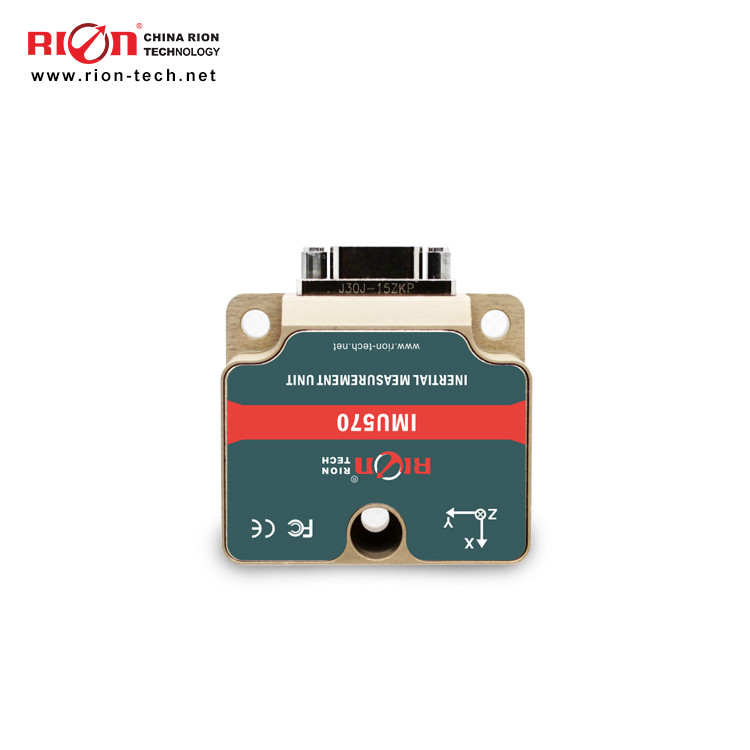
IMU570 содержит 3 волчка DOF, представляя 3 оси пространственной системы координат, а именно x, y и Z. Позитв оси x направлен вперед от соединителя к среднему устанавливая отверстию стикера, позитв Y-osи сразу правые к IMU, и позитв оси z направлен вниз ко дну IMU, как показано в диаграмме 1.











